ISO 15622 adalah Standar Internasional mengenai sistem transportasi cerdas, khususnya tentang persyaratan kinerja dan prosedur pengujian sistem kontrol jelajah adaptif (adaptive cruise control systems).
Standar versi terbaru yang masih berlaku adalah terbitan tahun 2018 dengan judul berikut :
- ISO 15622:2018 Intelligent transport systems — Adaptive cruise control systems — Performance requirements and test procedures
Standar ISO 15622:2018
Dokumen ini berisi strategi kontrol dasar, persyaratan fungsionalitas minimum, elemen antarmuka driver dasar, persyaratan minimum untuk diagnostik dan reaksi terhadap kegagalan, dan prosedur pengujian kinerja untuk sistem Adaptive Cruise Control (ACC).
Sistem ACC diwujudkan baik sebagai sistem Full Speed Range Adaptive Cruise Control (FSRA) atau sistem Limited Speed Range Adaptive Cruise Control (LSRA).
Sistem LSRA selanjutnya dibedakan menjadi dua jenis, yang membutuhkan kopling manual atau otomatis.
Adaptive Cruise Control pada dasarnya dimaksudkan untuk memberikan kontrol longitudinal kendaraan yang dilengkapi saat bepergian di jalan raya (jalan di mana kendaraan tidak bermotor dan pejalan kaki dilarang) di bawah arus bebas dan untuk sistem tipe FSRA juga untuk kondisi lalu lintas yang padat.
ACC dapat ditambah dengan kemampuan lain, seperti peringatan rintangan ke depan.
Untuk sistem tipe FSRA, sistem akan mencoba untuk berhenti di belakang kendaraan yang sudah dilacak dalam kemampuan deselerasi yang terbatas dan akan dapat memulai lagi setelah pengemudi memasukkan permintaan ke sistem untuk melanjutkan perjalanan dari keadaan diam.
Sistem tidak diperlukan untuk bereaksi terhadap objek yang diam atau bergerak lambat
Pengenalan Standar
Sebagaimana tercantum dalam “Klausa 0 Introduction”, bahwa :
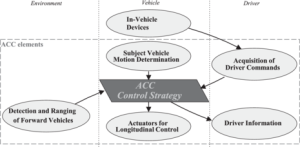
Fungsi sistem utama Adaptive Cruise Control (ACC) adalah untuk mengontrol kecepatan kendaraan secara adaptif terhadap kendaraan yang maju dengan menggunakan informasi tentang:
- (1) jarak ke kendaraan maju,
- (2) gerak kendaraan subjek (dilengkapi ACC)
- (3 ) perintah driver (lihat Gambar 1).
Berdasarkan informasi yang diperoleh, pengontrol (diidentifikasi sebagai “strategi kontrol ACC” pada Gambar 1) mengirimkan perintah ke aktuator untuk menjalankan strategi kontrol longitudinalnya dan juga mengirimkan informasi status ke pengemudi.
Secara opsional, pengemudi dapat memilih agar ACC menggunakan saran kecepatan yang disetel dari perangkat di dalam kendaraan.
Tujuan ACC adalah otomatisasi parsial dari kontrol kendaraan longitudinal dan pengurangan beban kerja pengemudi dengan tujuan mendukung dan meringankan pengemudi dengan cara yang nyaman.
Sistem ACC generik mencakup dua kelas:
- Full Speed Range ACC (FSRA) atau ACC Rentang Kecepatan Penuh,
- dan Limited Speed Range ACC (LSRA) atau ACC Rentang Kecepatan Terbatas.
Dokumen ini dapat digunakan sebagai standar tingkat sistem oleh standar lain, yang memperluas ACC ke standar yang lebih rinci, misalnya untuk deteksi spesifik dan konsep sensor jarak atau tingkat fungsionalitas yang lebih tinggi.
Oleh karena itu, masalah seperti persyaratan khusus untuk deteksi dan fungsi sensor jarak dan kinerja atau tautan komunikasi untuk solusi kooperatif tidak akan dipertimbangkan di sini.
Penerbitan Standar ISO 15622:2018
Standar ini diterbitkan dan dipublikasikan pada September 2018, berupa dokumen edisi 3 dengan jumlah halaman sebanyak 24 lembar.
Disusun oleh :
- Technical Committee ISO/TC 204 Intelligent transport systems, atau : Komite Teknis ISO/TC 204 Sistem transportasi cerdas.
ICS :
- 03.220.20 Road transport, atau : 03.220.20 Transportasi darat
- 35.240.60 IT applications in transport, atau : 35.240.60 Aplikasi IT dalam transportasi
Standar ini berkontribusi pada Tujuan Pembangunan Berkelanjutan atau Sustainable Development Goal berikut:
- Industri, inovasi dan infrastruktur
Dengan terbitnya standar ini, maka standar sebelumnya dinyatakan tidak berlaku dan ditarik yakni :
- ISO 15622: 2010
- ISO 22179:2009
Sebagaimana standar ISO lainnya, ISO 15622:2018 ini juga ditinjau setiap 5 tahun dan peninjauan sudah mencapai tahap 60,60.
Isi Standar ISO 15622:2018
Berikut adalah kutipan isi Standar ISO 15622:2018 yang diambil dari Online Browsing Platform (OBP) dari situs resmi iso.org.
Yang ditambah dengan berbagai keterangan dan informasi untuk mempermudah pemahaman pembaca.
Hanya bagian standar yang informatif yang tersedia untuk umum, OBP hanya menampilkan hingga klausa 3 saja.
Oleh karena itu, untuk melihat konten lengkap dari standar ini, maka pembaca harus membeli standar dari ISO ini secara resmi.
Daftar Isi Standar ISO 15622:2018
- Foreword
- Introduction
- 1 Scope
- 2 Normative references
- 3 Terms and definitions
- 4 Symbols and abbreviated terms
- 5 Classification
- 5.1 Type of ACC systems
- 6 Requirements
- 6.1 Basic control strategy
- 6.2 Functionality
- 6.3 Basic driver interface and intervention capabilities
- 6.4 Operational limits
- 6.5 Activation of brake lights
- 6.6 Failure reactions
- 7 Performance evaluation test methods
- 7.1 Environmental conditions
- 7.2 Test target specification
- 7.3 Automatic “Stop” capability test for FSRA-type only
- 7.4 Target acquisition range test
- 7.5 Target discrimination test
- 7.6 Curve capability test
- Annex A Technical information
- A.1 LIDAR, coefficient of test target
- A.2 Definition of the RCS of a corner cube type test target
- A.3 Following capability
- Bibliography
Foreword : Kata pengantar
ISO (Organisasi Internasional untuk Standardisasi) adalah federasi badan standar nasional (badan anggota ISO) di seluruh dunia.
Pekerjaan mempersiapkan Standar Internasional biasanya dilakukan melalui komite teknis ISO.
Setiap badan anggota yang tertarik pada suatu topik yang untuknya komite teknis telah dibentuk berhak untuk diwakili dalam komite tersebut.
Organisasi internasional, pemerintah dan non-pemerintah, bekerja sama dengan ISO, juga ambil bagian dalam pekerjaan tersebut.
ISO bekerja sama erat dengan International Electrotechnical Commission (IEC) dalam semua masalah standardisasi elektroteknik.
Prosedur yang digunakan untuk mengembangkan dokumen ini dan yang dimaksudkan untuk pemeliharaan lebih lanjut dijelaskan dalam Arahan ISO/IEC, Bagian 1.
Secara khusus, kriteria persetujuan yang berbeda yang diperlukan untuk berbagai jenis dokumen ISO harus diperhatikan.
Dokumen ini disusun sesuai dengan aturan editorial Arahan ISO/IEC, Bagian 2 (lihat www.iso.org/directives).
Perhatian diberikan pada kemungkinan bahwa beberapa elemen dari dokumen ini dapat menjadi subyek hak paten.
ISO tidak bertanggung jawab untuk mengidentifikasi salah satu atau semua hak paten tersebut.
Rincian hak paten apa pun yang diidentifikasi selama pengembangan dokumen akan ada di Pendahuluan dan/atau pada daftar pernyataan paten ISO yang diterima (lihat www.iso.org/patents).
Setiap nama dagang yang digunakan dalam dokumen ini adalah informasi yang diberikan untuk kenyamanan pengguna dan bukan merupakan suatu dukungan.
Tersedia pula halaman www.iso.org/iso/foreword.html untuk :
- penjelasan tentang arti istilah dan ekspresi khusus ISO yang terkait dengan penilaian kesesuaian,
- informasi tentang kepatuhan ISO terhadap prinsip-prinsip WTO dalam Technical Barriers to Trade (TBT).
Penyusunan standar
Dokumen ini disiapkan oleh :
- Technical Committee ISO/TC 204, Intelligent transport systems.
- atau : Komite Teknis ISO/TC 204, Sistem transportasi cerdas.
Edisi ketiga ISO 15622 ini membatalkan dan menggantikan ISO 15622:2010 dan ISO 22179:2009, yang telah direvisi secara teknis.
Perubahan utama dibandingkan dengan edisi sebelumnya adalah sebagai berikut:
- — edisi ketiga ISO 15622 diperluas dengan persyaratan kinerja dan prosedur pengujian untuk sistem kendali jelajah adaptif rentang kecepatan penuh yang sebelumnya dijelaskan dalam ISO 22179:2009 (dengan sedikit perubahan);
- — perangkat di dalam kendaraan diizinkan sebagai sumber yang memungkinkan untuk memperoleh perintah pengemudi (set-speed-advise);
- — klasifikasi kurva dan dependensi terkait telah dihapus;
- — mulai otomatis dari penahanan tidak lagi dilarang.
Mengenal ISO, IEC, WTO dan TBT Agreement
ISO (International Organization for Standardization) adalah suatu organisasi atau lembaga nirlaba internasional,
Tujuan dari ISO adalah untuk membuat dan memperkenalkan standar dan standardisasi internasional untuk berbagai tujuan.
Sebagaimana ISO, IEC juga merupakan suatu organisasi standardisasi internasional yang menyusun dan menerbitkan standar-standar internasional.
Namun ruang lingkupnya adalah untuk seluruh bidang elektrik, elektronik dan teknologi yang terkait atau bidang teknologi elektro (electrotechnology).
TBT Agreement (Technical Barriers to Trade) adalah perjanjian internasional mengenai hambatan teknis perdagangan di bawah kerangka Organisasi WTO (World Trade Organization).
WTO (World Trade Organization) adalah sebuah organisasi resmi internasional yang mengatur standar sistem perdagangan bebas di dunia.
Lebih jelas mengenai ISO, IEC, WTO dan TBT Agreement dapat dibaca pada artikel lain dari standarku.com berikut :
- Mengenal organisasi ISO, standardisasi internasional
- Standar IEC
- TBT Agreement, Standar Teknis Perdagangan
- Standar World Trade Organization
ISO 15622:2018 Klausa 1-3
1 Scope : Lingkup
Dokumen ini berisi strategi kontrol dasar, persyaratan fungsionalitas minimum, elemen antarmuka driver dasar, persyaratan minimum untuk diagnostik dan reaksi terhadap kegagalan, dan prosedur pengujian kinerja untuk sistem Adaptive Cruise Control (ACC).
Sistem ACC diwujudkan baik sebagai sistem Full Speed Range Adaptive Cruise Control (FSRA) atau sistem Limited Speed Range Adaptive Cruise Control (LSRA).
Sistem LSRA selanjutnya dibedakan menjadi dua jenis, yang membutuhkan kopling manual atau otomatis.
Adaptive Cruise Control pada dasarnya dimaksudkan untuk memberikan kontrol longitudinal kendaraan yang dilengkapi saat bepergian di jalan raya (jalan di mana kendaraan tidak bermotor dan pejalan kaki dilarang) di bawah arus bebas dan untuk sistem tipe FSRA juga untuk kondisi lalu lintas yang padat.
ACC dapat ditambah dengan kemampuan lain, seperti peringatan rintangan ke depan.
Untuk sistem tipe FSRA, sistem akan mencoba untuk berhenti di belakang kendaraan yang sudah dilacak dalam kemampuan deselerasi yang terbatas dan akan dapat memulai lagi setelah pengemudi memasukkan permintaan ke sistem untuk melanjutkan perjalanan dari keadaan diam.
Sistem tidak diperlukan untuk bereaksi terhadap objek yang diam atau bergerak lambat
2 Normative references : Referensi normatif
Dokumen-dokumen berikut dirujuk dalam teks sedemikian rupa sehingga sebagian atau seluruh isinya merupakan persyaratan dokumen ini.
Untuk referensi bertanggal, hanya edisi yang dikutip yang berlaku.
Untuk referensi yang tidak bertanggal, berlaku edisi terbaru dari dokumen yang diacu (termasuk amandemennya).
- ISO 2575, Road vehicles — Symbols for controls, indicators and tell-tales
- UN/ECE Regulation No. 13-H, Uniform provisions concerning the approval of passenger cars with regard to braking
3 Terms and definitions : Istilah dan definisi
Untuk tujuan dokumen ini, istilah dan definisi berikut berlaku.
ISO dan IEC memelihara database terminologi untuk digunakan dalam standardisasi di alamat berikut:
- — IEC Electropedia: tersedia di http://www.electropedia.org/
- — Platform penjelajahan ISO Online: tersedia di http://www.iso.org/obp
Klausa 3.1 – 3.8
3.1 active brake control
fungsi yang menyebabkan penerapan rem, tidak diterapkan oleh pengemudi, dalam hal ini dikendalikan oleh sistem ACC
3.2 Adaptive Cruise Control (ACC)
peningkatan pada sistem kontrol jelajah konvensional [lihat kontrol jelajah konvensional (3.5)], yang memungkinkan kendaraan subjek untuk mengikuti kendaraan di depan pada jarak yang sesuai dengan mengendalikan mesin dan/atau power train dan berpotensi mengerem
3.3 brake : rem
bagian di mana kekuatan yang menentang pergerakan kendaraan berkembang
- Catatan 1 : Ini bisa berupa rem gesekan (ketika gaya dihasilkan oleh gesekan antara dua bagian kendaraan yang bergerak relatif satu sama lain); rem listrik (ketika gaya dihasilkan oleh aksi elektro-magnetik antara dua bagian kendaraan yang bergerak relatif tetapi tidak bersentuhan satu sama lain); rem fluida (ketika gaya dihasilkan oleh aksi fluida yang terletak di antara dua bagian kendaraan yang bergerak relatif satu sama lain); rem mesin (ketika gaya berasal dari peningkatan buatan dalam aksi pengereman, ditransmisikan ke roda, dari mesin).
- Catatan 2: Definisi menurut ECE-R 13-H, kecuali untuk tujuan dokumen ini, perangkat kontrol transmisi tidak dianggap sebagai rem.
3.4 clearance
jarak dari permukaan belakang kendaraan depan ke permukaan depan kendaraan subjek
3.5 conventional cruise control
sistem yang mampu mengendalikan kecepatan kendaraan seperti yang diatur oleh pengemudi
3.6 forward vehicle
kendaraan di depan dan bergerak dalam arah yang sama dan berjalan di jalan yang sama dengan kendaraan subjek (3.11)
3.7 free-flowing traffic
lalu lintas yang lancar dan padat tidak termasuk situasi berhenti dan pergi dan pengereman darurat
3.8 time gap (τ)
selisih waktu dihitung sebagai jarak bebas, c, dibagi dengan kecepatan kendaraan v

Keterangan :
- C : clearance
- V : vehicle speed
CATATAN = c/v.
Klausa 3.9 – 3.16
3.9 set speed
kecepatan perjalanan yang diinginkan, diatur baik oleh pengemudi atau oleh beberapa sistem kontrol yang berada di luar sistem ACC
- Catatan 1 : Kecepatan yang disetel adalah kecepatan maksimum kendaraan yang diinginkan saat berada di bawah kendali ACC.
3.10 steady state
kondisi dimana nilai parameter yang dijelaskan tidak berubah terhadap waktu, jarak, dll.
3.11 subject vehicle
kendaraan yang dilengkapi dengan sistem ACC yang bersangkutan dan terkait dengan topik pembahasan
3.12 system states
salah satu dari beberapa tahap atau fase operasi sistem
- Catatan 1 : Lihat Gambar 3.
3.12.1 ACC off state
fase di mana akses langsung untuk aktivasi “status aktif ACC” dinonaktifkan
3.12.2 ACC stand-by state
fase di mana tidak ada kontrol longitudinal oleh sistem ACC dan sistem siap untuk aktivasi oleh driver
3.12.3 ACC active state
fase di mana sistem mengontrol kecepatan dan/atau jarak bebas
3.12.4 ACC speed control state
fase di mana sistem mengontrol kecepatan sesuai dengan kecepatan yang disetel
3.12.5 ACC following control sub-state
fase di mana sistem mengontrol jarak bebas ke kendaraan target sesuai dengan jeda waktu yang dipilih
3.12.6 FSRA hold state
fase di mana sistem aktif selama diam
- Catatan 1 : Diterapkan hanya untuk sistem tipe FSRA.
3.13 target vehicle
kendaraan yang diikuti kendaraan subjek
3.14 stationary object
objek di depan kendaraan subjek yang diam
3.15 slow moving object
objek di depan kendaraan subjek yang bergerak dengan kecepatan kurang dari MAX [1,0 m/s, 10% dari kecepatan kendaraan subjek] ke arah garis tengah kendaraan subjek
3.16 Full Speed Range Adaptive Cruise Control
FSRA cruise control
kelas sistem kendali jelajah adaptif (3.2), yang memungkinkan kendaraan subjek mengikuti kendaraan di depan pada jarak yang sesuai dengan mengendalikan mesin dan/atau power train dan mengerem hingga berhenti
Klausa 3.17 – 3.18
3.17 Limited Speed Range Adaptive Cruise Control
LSRA cruise control
kelas sistem kendali jelajah adaptif (3.2), yang memungkinkan kendaraan subjek mengikuti kendaraan di depan pada jarak yang sesuai dengan mengendalikan mesin dan/atau power train dan rem di atas kecepatan minimum tertentu
3.18 in-vehicle device
perangkat terintegrasi pabrikan yang memberikan nilai kecepatan set ACC tanpa komunikasi aktif ke perangkat eksternal
Daftar Pustaka atau Bibliography :
- [1] ISO 6161, Personal eye-protectors — Filters and eye-protectors against laser radiation
- [2] IEC 60825-1, Safety of laser products — Part 1: Equipment classification and requirements
- [3] Mitschke M., Wallentowitz H., Schwartz E., Vermeiden querdynamisch kritischer Fahrzustände durch Fahrzustandsüberwachung (Avoidance of critical driving states in case of lateral acceleration by using driving state supervision), VDI, 91, 1991
Penutup
Demikian artikel dari standarku.com mengenai Standar ISO 15622:2018.
Mohon saran dari pembaca untuk kelengkapan isi artikel ini, silahkan saran tersebut dapat disampaikan melalui kolom komentar.
Baca artikel lain :
- International Organization for Standardization
- Memahami apa itu Standar ISO
- ISO 1998-5 transportasi-penyimpanan-distribusi
- NHTSA, organisasi keselamatan transportasi AS
Sumber referensi :
- https://www.iso.org/obp/ui/#iso:std:iso:15622:ed-3:v1:en
- https://www.iso.org/standard/71515.html