ISO 15623 adalah Standar Internasional mengenai intelligent transport systems, khususnya tentang persyaratan kinerja dan prosedur pengujian dari forward vehicle collision warning systems.
- ISO 15623:2013 Intelligent transport systems — Forward vehicle collision warning systems — Performance requirements and test procedures
Standar ini terakhir ditinjau dan dikonfirmasi pada tahun 2019, oleh karena itu versi ini masih dinyatakan tetap berlaku hingga saat ini.
Standar ISO 15623:2013
ISO 15623:2013 menetapkan persyaratan kinerja dan prosedur pengujian untuk sistem yang mampu memperingatkan pengemudi tentang potensi tabrakan dari belakang dengan kendaraan lain di depan kendaraan subjek saat sedang beroperasi pada kecepatan biasa.
FVCWS beroperasi dalam rentang kecepatan kendaraan subjek tertentu, rentang kelengkungan jalan, dan jenis kendaraan target.
ISO 15623:2013 mencakup pengoperasian di jalan dengan radius tikungan lebih dari 125 m, dan kendaraan bermotor termasuk mobil, truk, bus, dan sepeda motor.
Tanggung jawab untuk pengoperasian kendaraan yang aman tetap pada pengemudi.
Pengenalan Standar
Sebagaimana tercantum dalam Klausa “0 Introduction”, bahwa :
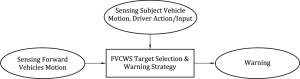
Fungsi sistem utama dari Forward Vehicle Collision Warning System (FVCWS) adalah untuk memperingatkan pengemudi ketika kendaraan subjek menghadapi situasi kendaraan maju di lintasan kendaraan subjek yang menjadi potensi bahaya.
Hal ini dilakukan dengan menggunakan informasi seperti:
- jarak ke depan kendaraan,
- kecepatan relatif kendaraan maju sehubungan dengan kendaraan subjek dan
- apakah kendaraan maju dalam lintasan kendaraan subjek.
Berdasarkan informasi yang diperoleh, pengontrol yang diidentifikasi sebagai ” FVCWS target selection and warning strategy (pemilihan target FVCWS dan strategi peringatan)” pada Gambar 1 menghasilkan peringatan kepada pengemudi.
Produsen mobil dan pemasok komponen di seluruh dunia telah giat mengejar pengembangan dan komersialisasi sistem FVCWS ini.
Sistem jenis ini telah diperkenalkan ke pasar di beberapa negara.
Dengan demikian upaya standardisasi dimulai pada tahun 1994 di antara negara-negara yang berkepentingan.
Standar Internasional ini disusun hanya untuk memenuhi persyaratan kinerja dasar dan prosedur pengujian untuk sistem tipe FVCWS.
Standar Internasional ini dapat digunakan sebagai dasar oleh standar lain untuk sistem yang memiliki lebih banyak fitur dan dapat melampaui Standar Internasional ini.
Penerbitan Standar ISO 15623:2013
Standar ini diterbitkan dan dipublikasikan pada Juli 2013, berupa dokumen edisi 2 dengan jumlah halaman sebanyak 30 lembar.
Disusun oleh :
- Technical Committee ISO/TC 204 Intelligent transport systems, atau : Komite Teknis Sistem transportasi cerdas ISO/TC 204.
ICS :
- 03.220.01 Transport in general, atau : 03.220.01 Transportasi secara umum
- 35.240.60 IT applications in transport, atau : 35.240.60 Aplikasi TI dalam transportasi
- 43.040.99 Other road vehicle systems, atau : 43.040.99 Sistem kendaraan jalan lainnya
Standar ini berkontribusi pada Tujuan Pembangunan Berkelanjutan atau Sustainable Development Goal berikut:
- Kesehatan dan lingkungan yang baik
- Industri, inovasi dan infrastruktur
Dengan terbitnya standar ini, maka standar sebelumnya dinyatakan tidak berlaku dan ditarik yakni ISO 15623: 2002.
Sebagaimana standar ISO lainnya, ISO 15623:2013 ini juga ditinjau setiap 5 tahun dan peninjauan sudah mencapai tahap 90,93 (dikonfirmasi).
Isi Standar ISO 15623:2013
Berikut adalah kutipan isi Standar ISO 15623:2013 yang diambil dari Online Browsing Platform (OBP) dari situs resmi iso.org.
Yang ditambah dengan berbagai keterangan dan informasi untuk mempermudah pemahaman pembaca.
Hanya bagian standar yang informatif yang tersedia untuk umum, OBP hanya menampilkan hingga klausa 3 saja.
Oleh karena itu, untuk melihat konten lengkap dari standar ini, maka pembaca harus membeli standar dari ISO ini secara resmi.
Daftar Isi Standar ISO 15623:2013
- Foreword
- Introduction
- 1 Scope
- 2 Normative references
- 3 Terms and definitions
- 4 Symbols and abbreviated terms
- 5 Specifications and requirements
- 5.1 System functionality
- 5.2 Necessary functions
- 5.3 Operating model
- 5.4 Warning functionality
- 5.5 Warning elements requirements
- 5.6 System Classification
- 5.7 Obstacle vehicle detection area and performance
- 5.8 FVCWS performance on curves
- 5.9 User safety requirements
- 5.10 Human interface requirements
- 5.11 Awareness of system limitations
- 6 Evaluation test method for measuring detection performance
- 6.1 Test target specification
- 6.2 Environmental conditions
- 6.3 Test method for detection zone
- 6.4 Test method for warning distance range and accuracy
- 6.5 Test method for target discrimination ability
- Annex A Basic consideration of collision warning
- A.1 Basic equation
- A.2 Scenarios where warning is issued
- A.3 Evaluation results of T and a
- A.4 Calculation examples of the warning distance
- A.5 Design parameter
- Annex B Obstacle detection along curves
- Annex C Laser radar — Coefficient of test target
- C.1 Solid angle, Ω
- C.2 Radiated intensity, I
- C.3 Intensity of irradiation, E
- C.4 Reflection Coefficient of Test Target (RCTT)
- Annex D Radio wave radar test target geometry
- Bibliography
Kata pengantar
Sebagaimana tercantum dalam Klausa “0 Foreword”, bahwa :
ISO (Organisasi Internasional untuk Standardisasi) adalah federasi badan standar nasional (badan anggota ISO) di seluruh dunia.
Pekerjaan mempersiapkan Standar Internasional biasanya dilakukan melalui komite teknis ISO.
Setiap badan anggota yang tertarik pada suatu topik yang untuknya komite teknis telah dibentuk berhak untuk diwakili dalam komite tersebut.
Organisasi internasional, pemerintah dan non-pemerintah, bekerja sama dengan ISO, juga ambil bagian dalam pekerjaan tersebut.
ISO bekerja sama erat dengan International Electrotechnical Commission (IEC) dalam semua masalah standardisasi elektroteknik.
Prosedur yang digunakan untuk mengembangkan dokumen ini dan yang dimaksudkan untuk pemeliharaan lebih lanjut dijelaskan dalam Arahan ISO/IEC, Bagian 1.
Secara khusus, kriteria persetujuan yang berbeda yang diperlukan untuk berbagai jenis dokumen ISO harus diperhatikan.
Dokumen ini disusun sesuai dengan aturan editorial Arahan ISO/IEC, Bagian 2. www.iso.org/directives
Perhatian diberikan pada kemungkinan bahwa beberapa elemen dari dokumen ini dapat menjadi subyek hak paten.
ISO tidak bertanggung jawab untuk mengidentifikasi salah satu atau semua hak paten tersebut.
Rincian hak paten apa pun yang diidentifikasi selama pengembangan dokumen akan ada di Pendahuluan dan/atau pada daftar ISO dari deklarasi paten yang diterima. www.iso.org/patents
Setiap nama dagang yang digunakan dalam dokumen ini adalah informasi yang diberikan untuk kenyamanan pengguna dan bukan merupakan suatu dukungan.
Komite yang bertanggung jawab untuk dokumen ini adalah :
- ISO/TC 204, Intelligent transport systems, atau : ISO/TC 204, Sistem transportasi cerdas.
Edisi kedua ini membatalkan dan menggantikan edisi pertama (15623:2002), yang telah direvisi secara teknis.
Mengenal ISO dan IEC
ISO (International Organization for Standardization) adalah suatu organisasi atau lembaga nirlaba internasional.
Tujuan dari ISO adalah untuk membuat dan memperkenalkan standar dan standardisasi internasional untuk berbagai tujuan.
Sebagaimana dengan ISO, IEC juga merupakan organisasi standardisasi internasional yang menyusun dan menerbitkan standar-standar internasional.
Namun ruang lingkupnya adalah untuk seluruh bidang elektrik, elektronik dan teknologi yang terkait atau bidang teknologi elektro (electrotechnology).
Lebih jelas mengenai ISO dan IEC dapat dibaca pada artikel lain dari standarku.com berikut :
ISO 15623:2013 Klausa 1-3
1 Scope : Lingkup
Standar Internasional ini menetapkan persyaratan kinerja dan prosedur pengujian untuk sistem yang mampu memperingatkan pengemudi tentang potensi tabrakan dari belakang dengan kendaraan lain di depan kendaraan subjek saat sedang beroperasi pada kecepatan biasa.
FVCWS beroperasi dalam rentang kecepatan kendaraan subjek tertentu, rentang kelengkungan jalan, dan jenis kendaraan target.
Standar Internasional ini mencakup pengoperasian di jalan dengan radius tikungan lebih dari 125 m, dan kendaraan bermotor termasuk mobil, truk, bus, dan sepeda motor.
Tanggung jawab untuk pengoperasian kendaraan yang aman tetap pada pengemudi.
2 Normative references : Referensi normatif
Dokumen-dokumen berikut, seluruhnya atau sebagian, secara normatif dirujuk dalam dokumen ini dan sangat diperlukan untuk penerapannya.
Untuk referensi bertanggal, hanya edisi yang dikutip yang berlaku.
Untuk referensi yang tidak bertanggal, berlaku edisi terbaru dari dokumen yang diacu (termasuk amandemennya).
- IEC 825-1:1993, Safety of laser products — Part 1: Equipment classification, requirements and user’s guide (includes update of 1994)
3 Terms and definitions : Istilah dan definisi
Untuk tujuan dokumen ini, istilah dan definisi berikut berlaku.
Klausa 3.1 – 3.7
3.1 collision warning : peringatan tabrakan
informasi yang diberikan sistem kepada pengemudi yang menunjukkan perlunya tindakan segera untuk menghindari atau mengurangi keparahan potensi tabrakan bagian belakang dengan kendaraan lain di depan
- Catatan 1: Peringatan ini dikeluarkan pada tahap lanjut dari situasi berbahaya untuk memperingatkan pengemudi tentang perlunya melakukan pengereman darurat, perubahan jalur atau manuver darurat lainnya untuk menghindari tabrakan.
3.2 reflection coefficient of test target (RCTT) : koefisien refleksi target uji
reflektifitas radar optik dari target, yang didefinisikan sebagai intensitas radiasi menuju penerima (Iref – W/sr) yang diukur pada level target, segera setelah pantulan; dibagi dengan intensitas penyinaran yang diterima dari pemancar (Et – W/m2) yang diukur pada tingkat target, sesaat sebelum pemantulan
- Catatan 1 : Satuan untuk nilai RCTT adalah dalam m2/sr (lihat Lampiran C).
3.3 forward vehicle : kendaraan depan
kendaraan di depan dan bergerak dalam arah yang sama dan berjalan di jalan yang sama dengan kendaraan subjek
3.4 forward vehicle collision warning system (FVCWS) : sistem peringatan tabrakan kendaraan maju
sistem yang mampu memperingatkan pengemudi tentang potensi tabrakan dengan kendaraan lain di depan di jalur depan kendaraan subjek
3.5 obstacle vehicles : kendaraan penghalang
kendaraan, baik yang bergerak maupun yang tidak bergerak, mempertimbangkan potensi bahaya yang dapat dideteksi oleh sistem ini
- Contoh: Kendaraan bermotor saja, yaitu mobil, truk, bus, dan sepeda motor.
3.6 preliminary collision warning : peringatan tabrakan awal
informasi yang diberikan sistem kepada pengemudi pada tahap awal dari situasi yang berpotensi berbahaya yang dapat mengakibatkan tabrakan dari belakang.
- Catatan 1 : Sistem mungkin memberikan peringatan ini sebelum peringatan tabrakan.
3.7 radar cross section (RCS) : penampang radar
ukuran kekuatan reflektif target radar yang diukur dalam meter persegi, dan didefinisikan sebagai 4π kali rasio daya per unit sudut padat yang tersebar dalam arah tertentu dengan daya per satuan luas dalam insiden gelombang radio pada hamburan dari titik tertentu
Klausa 3.8 – 3.18
3.8 visibility : visibilitas
jarak dimana iluminasi berkas cahaya putih non-difusif dengan suhu warna 2700 K dikurangi menjadi 5% dari iluminasi sumber cahaya aslinya
3.9 adaptive Cruise Control (ACC) : Kontrol Pelayaran adaptif
peningkatan pada sistem kendali jelajah konvensional yang memungkinkan kendaraan subjek mengikuti kendaraan di depan pada jarak yang sesuai dengan mengendalikan mesin dan/atau power train dan opsional rem
- Catatan 1 : Lihat ISO 15622.
3.10 adjacent lane : jalur yang berdekatan
lajur perjalanan yang berbatasan satu lajur dengan lajur di mana kendaraan subjek berjalan dan memiliki arah perjalanan yang sama dengan lajur kendaraan subjek
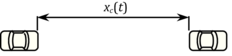
3.11 clearance xc(t)
jarak xc(t) dari permukaan belakang kendaraan target ke permukaan depan kendaraan subjek
3.12 cut-in vehicle
kendaraan yang berdekatan di depan yang memiliki komponen gerak lateral menuju jalur kendaraan subjek
3.13 jerk
turunan ketiga terhadap waktu posisi suatu benda; ekuivalen laju perubahan percepatan suatu benda; dianggap sebagai ukuran kekerasan gerak kendaraan
3.14 minimum velocity (Vmin) : kecepatan minimum
kecepatan minimum subjek kendaraan (SV) yang FVCWS harus mampu memulai peringatan
3.15 rear-end collision : tabrakan dari belakang
tabrakan kendaraan depan di mana bagian depan kendaraan subjek menabrak bagian belakang kendaraan depan
3.16 relative velocity (vr(t)) : kecepatan relatif
perbedaan antara kecepatan longitudinal kendaraan subjek (SV) dan kendaraan target (TV), vr(t), diberikan oleh persamaan; ekuivalen laju perubahan terhadap waktu jarak antara dua kendaraan. Nilai positif dari kecepatan relatif menunjukkan bahwa kendaraan target bergerak lebih cepat daripada kendaraan subjek, dan jarak di antara mereka bertambah seiring waktu.
3.17 required deceleration (Areq) : perlambatan yang diperlukan
perlambatan minimum yang, jika konstan, akan memungkinkan kendaraan subjek menyamai kecepatan kendaraan target tanpa menyentuh kendaraan target dan dengan demikian mencegah tabrakan:
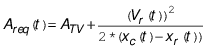
- Catatan 1 : xr(t) adalah jumlah pengurangan jarak bebas karena waktu reaksi.
3.18 subject vehicle (SV) : kendaraan subjek
kendaraan yang dilengkapi dengan FVCWS sebagaimana didefinisikan di sini
Klausa 3.19 – 3.24
3.19 target vehicle (TV) : kendaraan sasaran
kendaraan depan yang paling dekat dengan jalur depan kendaraan subjek; kendaraan depan yang dioperasikan FVCWS
3.20 time to collision (TTC) : waktu untuk tabrakan
perkiraan waktu yang dibutuhkan kendaraan subjek untuk bertabrakan dengan kendaraan target dengan asumsi kecepatan relatif saat ini tetap konstan, seperti yang diberikan dalam persamaan berikut:

3.21 enhanced time to collision (ETTC) : waktu dibutuhkan untuk tabrakan
waktu yang dibutuhkan kendaraan subjek untuk bertabrakan dengan kendaraan target dengan asumsi percepatan relatif antara kendaraan subjek (SV) dan kendaraan target (TV) tetap konstan, seperti yang diberikan dalam persamaan berikut:

3.22 warning braking : peringatan pengereman
tindakan di mana FVCWS merespons deteksi kemungkinan tabrakan dari belakang dengan menerapkan rem secara otomatis dalam waktu singkat untuk memberikan peringatan kepada pengemudi
3.23 FVCWS warning modalities
sarana yang digunakan untuk menyampaikan berbagai jenis peringatan FVCWS kepada pengemudi.
- Contoh: Isyarat visual, auditori, dan/atau haptik.
3.24 lateral offset : offset lateral
jarak lateral antara garis tengah longitudinal kendaraan subjek (SV) dan kendaraan target (TV), diukur sebagai persentase dari lebar SV, sehingga jika pusat kedua kendaraan sejajar, nilainya nol
4 Simbol dan istilah yang disingkat :
| alateral_max | maximum allowed lateral acceleration in curves |
| amin | minimum deceleration of the subject vehicle’s emergency braking |
| d0 | minimum detectable distance without distance measuring capability |
| d1 | minimum detectable distance with distance measuring capability |
| d2 | minimum detection distance for a cut-in vehicle |
| dmax | maximum detectable distance |
| h | upper detection height from ground |
| h1 | lower detection height from ground |
| RCTT | reflection coefficient for test target for infrared reflector |
| Tmax | maximum driver’s brake reaction time after the warning |
| Tmin | minimum driver’s brake reaction time after the warning |
| Tresp | driver brake reaction time |
| Tb | braking system response time |
| RCS | radar cross section |
| Vcircle_start | speed of the test vehicles at the start of the test |
| Vmax | maximum vehicle speed at which the system is capable of operating |
| Vmin | minimum vehicle speed at which the system is capable of operating |
| Vrel_max | maximum relative vehicle speed at which the system is capable of operating |
| WL | lane width |
| WV | subject vehicle width |
Daftar Pustaka atau Bibliography :
- [1] Johansson G., Rumar K, Driver’s Brake Reaction Times”. Hum. Factors. 1971, 13 (1) pp. 23–27
- [2] ISO 22839, Intelligent transport systems — Forward vehicle collision mitigation systems — Operation, performance, and verification requirements
- [3] ISO 15622:2002, Transport Information and Control Systems — Adaptive Cruise Control Systems — Performance requirements and test procedures
- [4] ISO 22179, Intelligent transport systems — Full speed range adaptive cruise control (FSRA) systems — Performance requirements and test procedures
- [5] ISO 22178, Intelligent transport systems — Low speed following (LSF) systems — Performance requirements and test procedures
- [6] ISO 2575, Road vehicles — Symbols for controls, indicators and tell-tales
- [7] ISO 6161:1981, Personal eye-protectors — Filters and eye-protectors against laser radiation
- [8] ISO 15006, Road vehicles — Ergonomic aspects of transport information and control systems — Specifications for in-vehicle auditory presentation
- [9] ISO 15008, Road vehicles — Ergonomic aspects of transport information and control systems — Specifications and test procedures for in-vehicle visual presentation
Penutup
Demikian artikel dari standarku.com mengenai Standar ISO 15623:2013.
Mohon saran dari pembaca untuk kelengkapan isi artikel ini, silahkan saran tersebut dapat disampaikan melalui kolom komentar.
Baca artikel lain :
- Vehicle Regulation Standar bagi Produsen Kendaraan
- Homologasi, Standar Otomotif
- International Organization for Standardization
- Memahami apa itu Standar ISO
- Memahami Standard atau Standar
- ISO 13628-8 Remotely Operated Vehicle ROV
- Struktur Standar ISO 26262 Road vehicles Functional safety
- Standar ISO 26262 Road vehicles, Functional safety
- ISO 15622 adaptive cruise control
- ISO 10487-2 sambungan radio mobil
- Tekanan Angin Ban Mobil Standar Indonesia
- Standar Aki Mobil
Sumber referensi :
- https://www.iso.org/obp/ui/#iso:std:iso:15623:ed-2:v1:en
- https://www.iso.org/standard/56655.html